Modular Coastal Navigation Platform for USVs in GPS-Denied Environments
Developed a modular simulation framework in ROS 2 and Gazebo to evaluate GPS-denied navigation methods for unmanned surface vehicles (USVs).
Click a project to see details, figures, and links.
Developed a modular simulation framework in ROS 2 and Gazebo to evaluate GPS-denied navigation methods for unmanned surface vehicles (USVs).
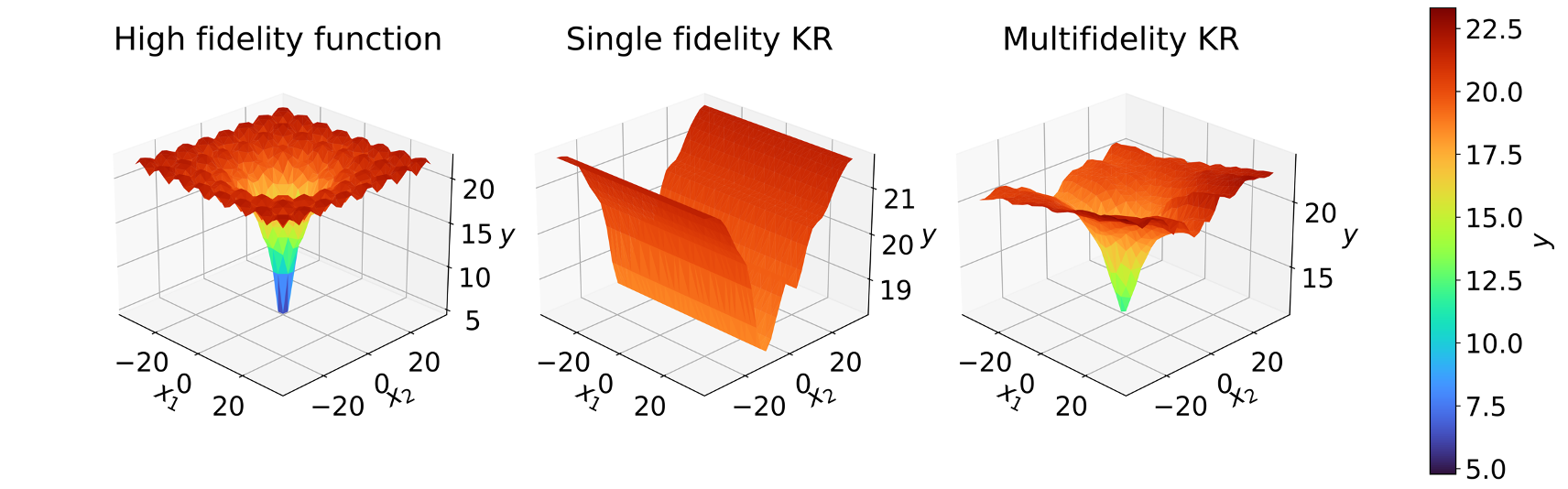
Multifidelity estimator for kernel regression problem that is more robust than the single fidelity kernel regression model under the same computational budget
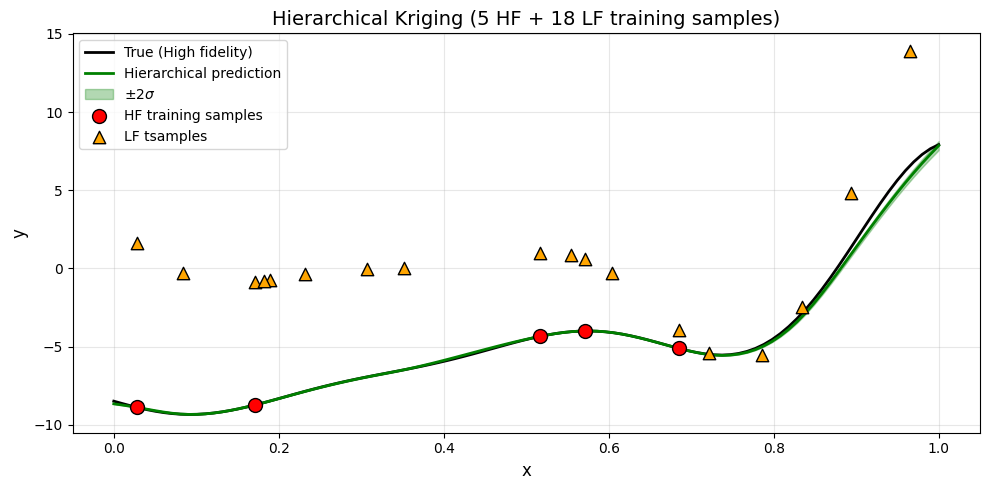
Multifidelity Monte Carlo budget allocation strategy for hierarchical Kriging
An error-aware digital twin that accounts for surrogate model errors during the identification process
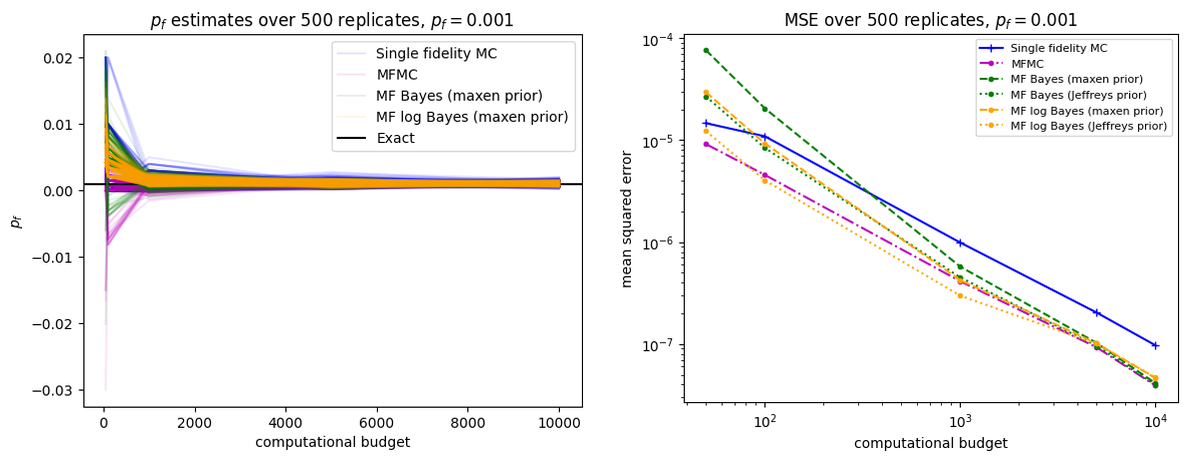
Develop multifidelity estimators to predict the probability of failure in rare event simulation under limited computational budgets
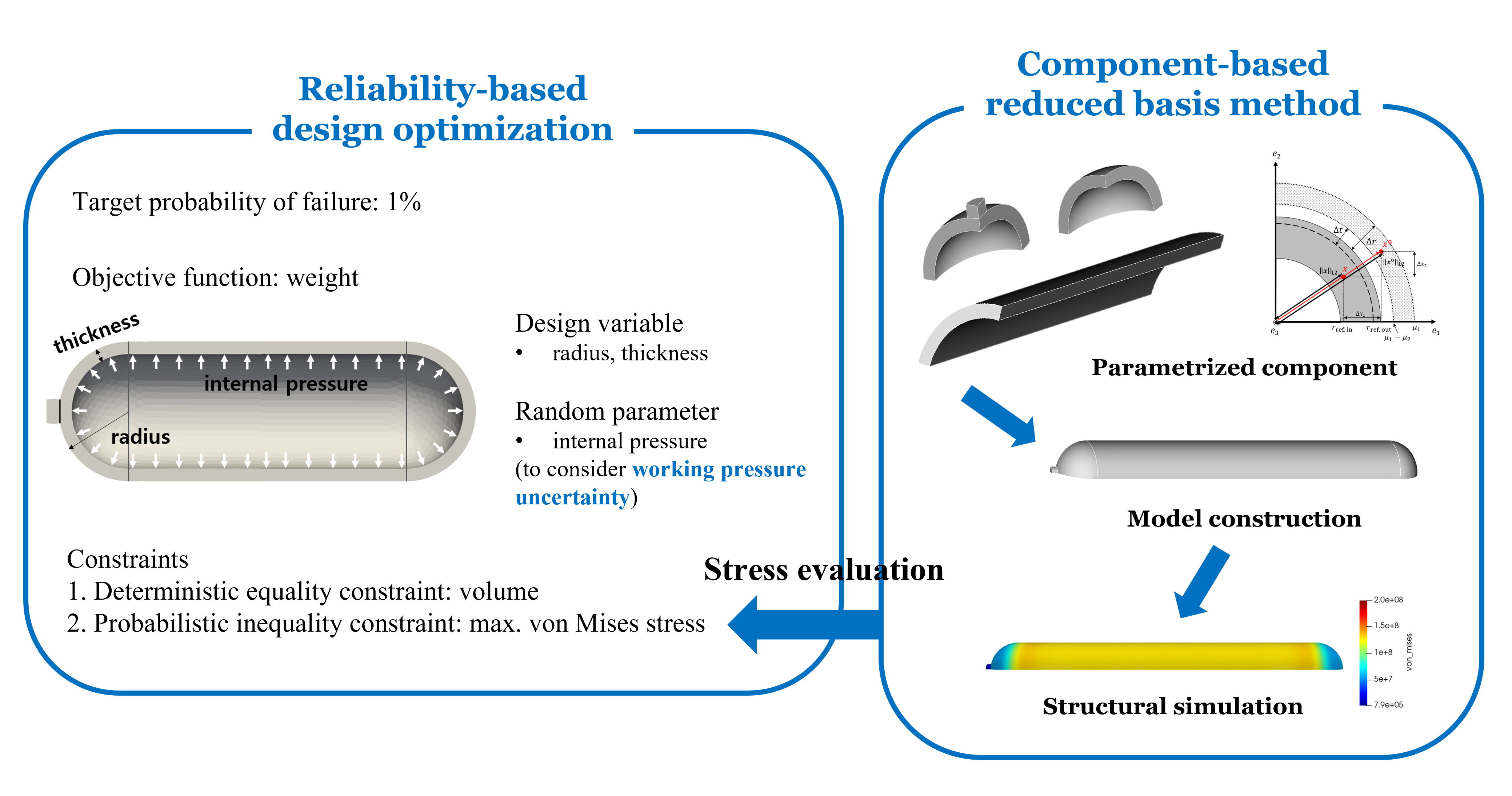
Reliability-based design optimization of a hydrogen pressure vessel under operating condition uncertainty via a parametrized component-based reduced basis model
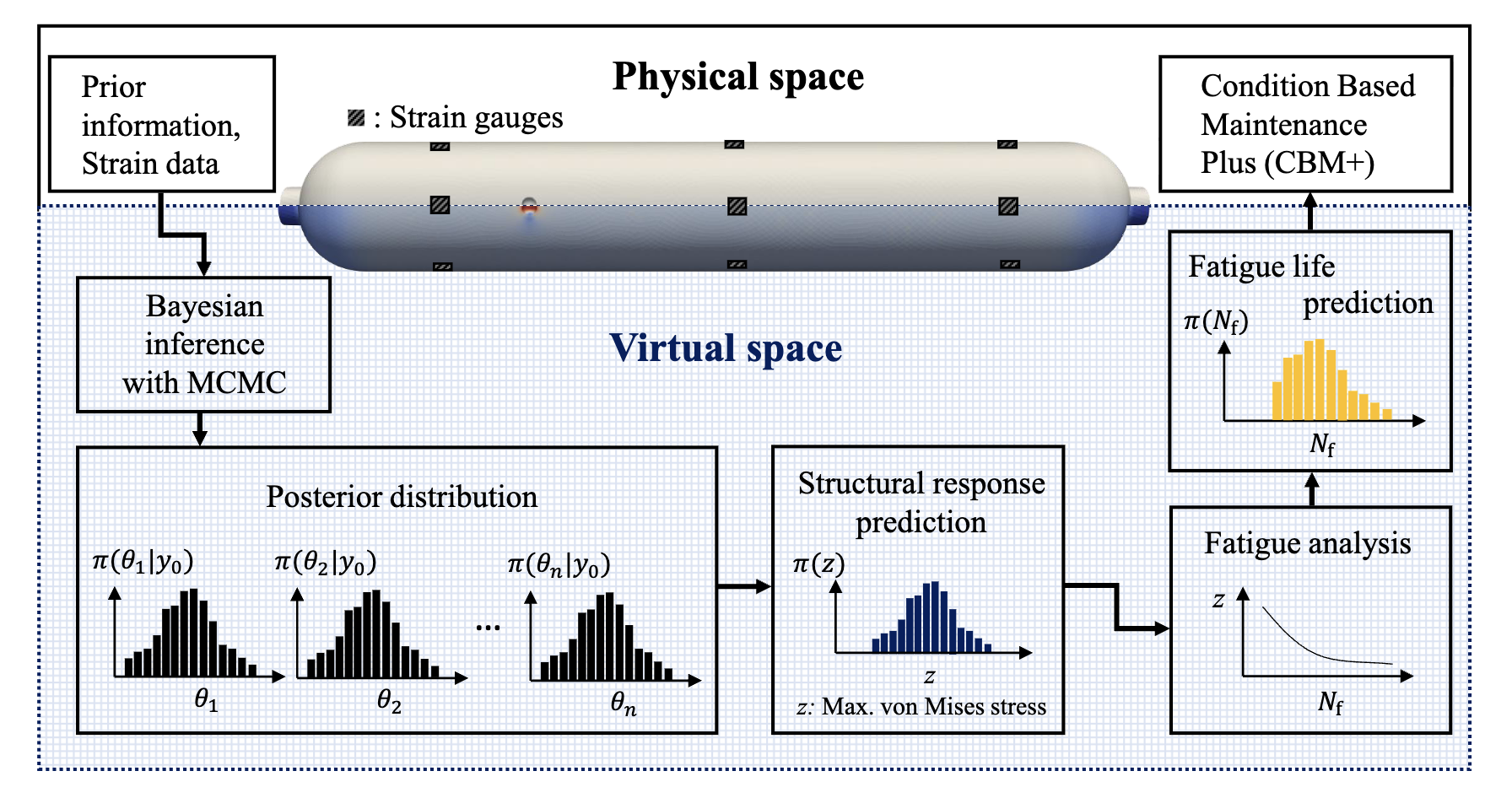
Digital twin-driven fatigue life prediction of a defected hydrogen pressure vessel based on rapid yet accurate defect size diagnosis